TB6600HG pokretački pokretač motora: Specifikacije, značajke i aplikacije
Katalog
TB6600HG Opis

TB6600HG je PWM-ov helikopter tipa s jednim čipom bipolarnim sinusoidnim pokretačem motora.Može postići kontrolu rotacije prema naprijed i obrnuto kroz 2-faznu, 1-2-fazu, W1-2-fazu, 2W1-2-fazu i 4W1-2-fazne načine uzbuđenja.2-fazni bipolarni stepper motori pokreću se isključivo nisko-vibracijskim, visokim učinkom signalom.
Alternative i ekvivalenti:
• TB6600FG
• L6258EX
Specifikacije TB6600HG
• Status dijela: aktivan
• Pakiranje: ladica
• Paket / slučaj: HZIP-25
• Proizvođač: Toshiba
• Radna struja opskrbe: 4,2 mA
• Radni napon napajanja: 2 V do 5,5 V
• Ocjena napona opterećenja: 8 V do 42 V
• Broj izlaza: 2 izlaza
• PD - Raspršivanje snage: 40 W
• Stil montiranja: kroz rupu
• Dužina paketa/širina/visina: 29,3 mm (max) /4,5 mm/15,7 mm
• Kategorija proizvoda: Motor / Motion / Upravi za paljenje i upravljački programi
Radni uvjeti TB6600HG
(TA = -30 ° C do 85 ° C)
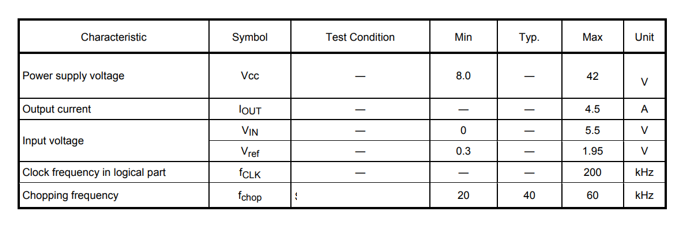
Napomena: Dva VCC terminala trebaju biti programirana isti napon.Maksimalna struja radnog raspona ne može se nužno provesti ovisno o različitim uvjetima, jer je izlazna struja ograničena PD disipacijom snage.Obavezno izbjegavajte korištenje IC -a u stanju zbog čega bi temperatura prelazila TJ (AVG.) = 107 ° C.
Napon napajanja od 42 V i izlazna struja od 4,5 A su maksimalne vrijednosti radnog raspona.Molimo dizajnirajte krug s dovoljno opuštenosti unutar ovog raspona uzimajući u obzir varijacije napajanja, vanjski otpor i električne karakteristike IC -a.U slučaju da prelazi napon napajanja od 42 V i izlaznu struju od 4,5 A, IC neće raditi normalno.
Kako povezati TB6600HG na upravljački sustav?
Snaga veza: Prvo, obavezno osigurajte odgovarajuće napajanje TB6600HG.Prilikom napajanja TB6600HG obično morate povezati dvije igle: VCC (pozitivno napajanje) i GND (uzemljena žica).VCC pin odgovoran je za pružanje napona potrebnog za pogon čipa, dok GND pin služi kao razina referentnog tla.Moramo osigurati da je napajanje stabilno i zadovoljava specifikacije TB6600HG.
Signalni priključak: Prema specifičnim potrebama upravljačkog sustava, moramo spojiti upravljački signal na odgovarajući pin čipa TB6600HG.Ovi upravljački signali obično uključuju signale upravljanja smjerom i koračni impulsni signali itd., Koji su odgovorni za upute kako motor djeluje, uključujući smjer rotacije i brzinu rotacije.
Priključak motora: Moramo biti posebno oprezni pri spajanju motora na čip vozača TB6600HG.Dvije žice motora, obično crvene i crne, predstavljaju pozitivne i negativne stupove motora.Crvena žica obično se povezuje s pozitivnim terminalom motora, dok se crna žica povezuje na negativni terminal.
Povratna veza (neobavezno): Ako se koder koristi za kontrolu povratnih informacija, također moramo povezati izlazni signal kodera na upravljački sustav.To obično uključuje izlaze faze A, faze B i faze Z (ako je dostupno).
Prizemljenje: Moramo osigurati da je uobičajena žica za uzemljenje svih oprema ispravno spojena kako bi se izbjegle smetnje i oštećenja.
Postavke inicijalizacije: Nakon završetka veze moramo inicijalizirati postavke TB6600HG kako bismo osigurali da ispravno radi.To može uključivati postavljanje ograničenja struje, načina koraka itd.
Značajke proizvoda TB6600HG
• Usvojite povećani radijator za dobro rasipanje topline
• Upute za postavljanje pododjeljka ispisuju se na stražnjoj strani ploče
• S izlaznom funkcijom zaštite kratkog spoja, bez brige upotrebe
• Usvojite 6N137 velike optičke spojke kako biste osigurali veliku brzinu bez gubitka sinkronizacije
• Izlazna struja je čvrsto podesiva kako bi zadovoljila vaše različite potrebe za aplikacijom
• Koristeći uobičajeni način unosa anode, postoje dva ulazna terminala, što ožičenje čine prikladnijim
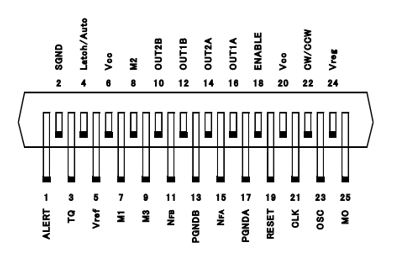
PIN konfiguracija TB6600HG
Opis funkcije TB6600HG
Postavke pobude
Način pobuđenja može se odabrati iz sljedećih osam modova pomoću M1, M2 i M3 ulaza.Kad se M1, M2 ili M3 ulazi pomaknu tijekom rada motora, novi način pobude pokreće se iz početnog načina rada, potencijalno ometajući kontinuitet valnog oblika izlazne struje.
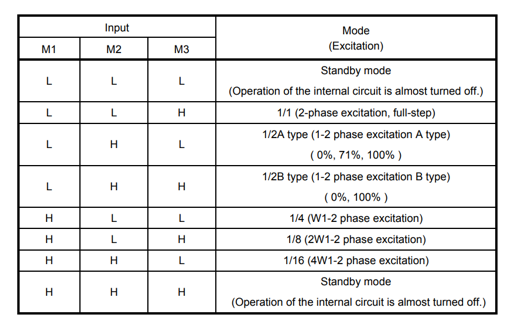
Napomena: Za promjenu uzbudljivog načina mijenjanjem M1, M2 i M3 provjerite da ne postavite m1 = m2 = m3 = l ili m1 = m2 = m3 = H.
Način čekanja
Način rada prelazi u način pripravnosti u stanju m1 = m2 = m3 = l ili m1 = m2 = m3 = h3 = H. Potrošnja energije je minimizirana isključivanjem svih operacija, osim zaštite rada.U stanju čekanja, izlazni terminal MO je Hz.Način pripravnosti oslobađa se promjenom stanja m1 = m2 = m3 = l i m1 = m2 = m3 = h u drugo stanje.Ulazni signal nije prihvaćen za oko 200 μs nakon oslobađanja načina pripravnosti.
Način propadanja
Punjenje i ispuštanje struje u PWM načinu obično zahtijeva oko pet ciklusa u OSCM -u.40 -postotni način brzog propadanja pokreće se induciranjem propadanja u posljednja dva ciklusa načina brzog propadanja, pri čemu je omjer od 40 posto dosljedno fiksiran.Odnos između frekvencije glavnog sata (FMCLK), OSCM frekvencije (FOSCM) i PWM frekvencije (FCHOP) prikazan je na sljedeći način:
foscm = 1/20 × fmclk
fchop = 1/100 × fmclk
Kada je rosc = 51kΩ, glavni sat = 4MHz, OSCM = 200kHz, frekvencija PWM (FCHOP) = 40kHz.
Početni način
Kada se koristi resetiranje, fazne struje su sljedeće.
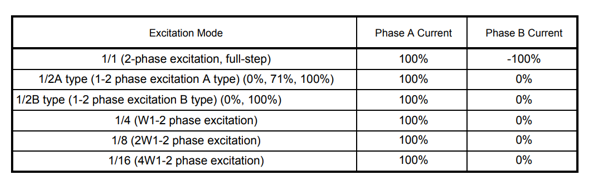
Trenutni smjer je definiran na sljedeći način.
OUT1A → OUT2A: Smjer prema naprijed
OUT1B → OUT2B: Smjer prema naprijed
Primjena TB6600HG
U nastavku su neke aplikacije TB6600HG.
• Svjetla
• Ugostiteljske zgrade
• Veliki vanjski LED zaslon
• Alternativa skrivenim svjetlima
• Industrijska svjetla s visokim prolazom
• Povratno osvjetljenje velikog formata
• Prikažite LED pozadinsko osvjetljenje
• Pametni telefoni s omogućenim kamerom
• Topologije pokretača ili odstupanja
Uobičajene greške i rješenja TB6600HG
Sljedeće navodi neke uobičajene greške u vezi s TB6600HG i njihovim rješenjima kako bi vam pomogli da poduzmete brzu akciju prilikom susreta s greškama i zaštite normalnog rada uređaja.
Neuspjeh jedan: Pregrijavanje čipsa vozača
Sam TB6600HG čip je prevrust, vjerojatno zbog prekomjernog opterećenja ili loših uvjeta rasipanja topline.
Rješenje: Poboljšajte rasipanje topline
Moramo dodati hladnjake ili ventilatore na vozački čip i motor kako bismo osigurali da mogu u potpunosti rasipati toplinu tijekom rada.Istodobno, moramo zadržati okoliš oko čipa vozača i motora dobro prozračiti kako bi se izbjeglo pregrijavanje.
Neuspjeh dva: Motor se okreće u pogrešnom smjeru
Nakon što motor primi pogonski signal, smjer rotacije nije u skladu s očekivanim, možda je upravljački signal pogrešan ili pogonski čip nije pravilno konfiguriran.
Rješenje: Provjerite upravljački signal
Moramo pažljivo provjeriti kontrolne signale poslane TB6600HG kako bismo osigurali da su upravljački signal i signal impulsa ispravni.Ako se za slanje signala koristi mikrokontroler, provjerite programski kôd i konfiguraciju PIN -a.
Neuspjeh tri: Motor se ne okreće
Motor ne reagira nakon primanja pogonskog signala, može se dogoditi da čip vozača ne radi ispravno ili postoji problem s vezom između motora i vozačkog čipa.
Rješenje: Provjerite napajanje i povezivanje
Moramo biti sigurni da je napajanje TB6600HG normalno, a veza između motora i čipa vozača čvrsta.Provjeravamo napon i struju u krugu pomoću multimetra kako bismo bili sigurni da su u normalnom rasponu.
Neuspjeh četiri: ozbiljno grijanje motora
Motor stvara prekomjernu toplinu tijekom rada, što može biti uzrokovano pretjeranom strujom ili lošom rasipanjem topline.
Rješenje: Podesite trenutnu postavku
Ako motor generira ozbiljnu toplinu, možemo pokušati smanjiti izlaznu struju čipa vozača.Podešavanjem trenutne postavke TB6600HG možemo učinkovito ograničiti veličinu izlazne struje, što zauzvrat smanjuje teret na motoru i osigurava stabilan i siguran rad motora.
Često postavljana pitanja [FAQ]
1. Koliki je raspon radne temperature TB6600HG?
Radna temperatura TB6600Hg kreće se od -30 ° C do 85 ° C.
2. Što je TB6600HG?
TB6600HG je vrsta pokretača stepper motora, dizajnirana za kontrolu koračnih motora u raznim aplikacijama kao što su CNC strojevi, 3D pisači, robotika i automatizacijski sustavi.
3. Koje su ključne značajke TB6600HG?
Značajke TB6600HG uključuju podesivu motornu struju, postavke rezolucije koraka, ugrađenu zaštitu pregrijavanja i opto izolirane ulaze za kontrolu signala.