Uvod u upravljačke sustave: rad, vrste i primjena
Koristite upravljačke sustave kad god stroj automatski održava stabilnu vrijednost, poput temperature, brzine ili razine.Ovaj članak objašnjava što je kontrolni sustav, kako njegovi dijelovi rade zajedno i kako povratne informacije održavaju izlaz točnim.Također ćete vidjeti glavne vrste sustava i kako se ponašaju u radu.Uključene su uobičajene upotrebe, prednosti i ograničenja.Katalog
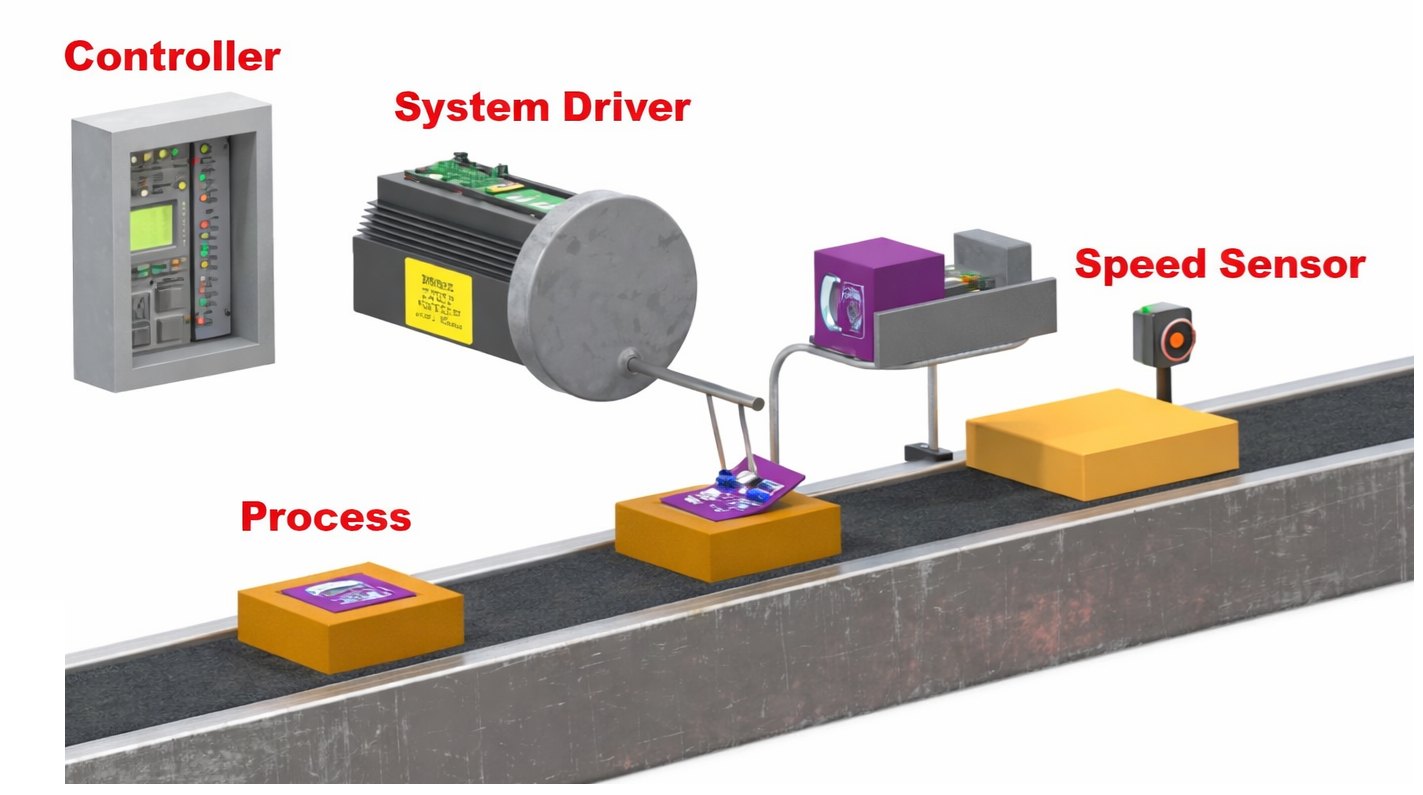
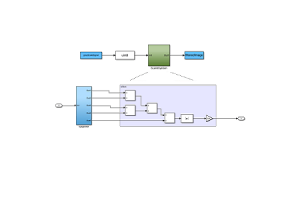
Slika 1. Primjer upravljačkog sustava
Što je sustav kontrole?
Kontrolni sustav je sustav koji održava izmjerenu vrijednost blizu željene ciljane vrijednosti.Njegova je svrha automatska prilagodba procesa tako da rezultat ostane točan čak i kada se uvjeti promijene.Na primjer, sobni termostat održava temperaturu blizu zadane razine, a tempomat automobila održava odabranu brzinu vozila.Regulator razine spremnika za vodu također održava visinu vode na odabranoj oznaci.Jednostavnim rječnikom rečeno, sustav upravljanja kontinuirano provjerava i ispravlja varijablu kako bi odgovarala traženoj vrijednosti.
Osnovni elementi sustava upravljanja
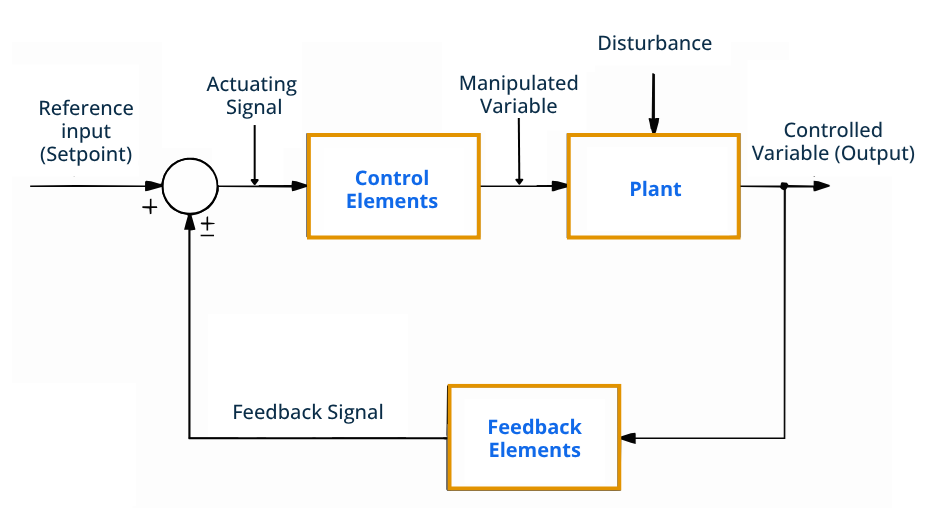
Slika 2. Blok dijagram upravljačkog sustava
Upravljački sustav sastoji se od nekoliko standardnih dijelova od kojih svaki obavlja određenu zadaću.
• Referentni ulaz (postavljena vrijednost)
Ovo je željena vrijednost koju sustav pokušava održati.Predstavlja odabrano ciljno stanje.Sustav uvijek uspoređuje stvarnu vrijednost s ovom referencom.
• Aktivirajući signal
Ovo je signal koji se proizvodi nakon usporedbe željenih i stvarnih vrijednosti.Predstavlja koliko je prilagodba potrebna.Signal priprema sustav za korekciju.
• Kontrolni elementi
Ovi dijelovi upravljaju procesom donošenja odluka.Oni određuju korektivnu akciju na temelju primljenog signala.Izlaz iz ove faze priprema proces za prilagodbu.
• Manipulirana varijabla
Ovo je podesiva količina koja se šalje u proces.Promjena ove vrijednosti utječe na konačni rezultat.To je varijabla koju sustav može izravno mijenjati.
• Biljka
Biljka je proces koji se kontrolira.Proizvodi konačnu izlaznu vrijednost.Sustav ima za cilj zadržati ovaj izlaz na željenoj razini.
• Smetnja
Ovo je neželjena promjena koja utječe na proces.Može odmaknuti izlaz od željene vrijednosti.Sustav to mora kompenzirati.
• Kontrolirana varijabla (izlaz)
Ovo je stvarni izmjereni rezultat procesa.Prikazuje trenutno stanje sustava.Cilj je održati ga jednakim referentnom ulazu.
• Elementi povratne informacije
Oni mjere izlaz i šalju informacije natrag na provjeru.Oni sustavu daju trenutno stanje.To omogućuje određivanje korekcije.
• Signal povratne veze
Ovo je vraćena informacija o izlaznoj vrijednosti.Predstavlja stanje procesa.Sustav ga koristi za usporedbu.
Princip rada upravljačkog sustava
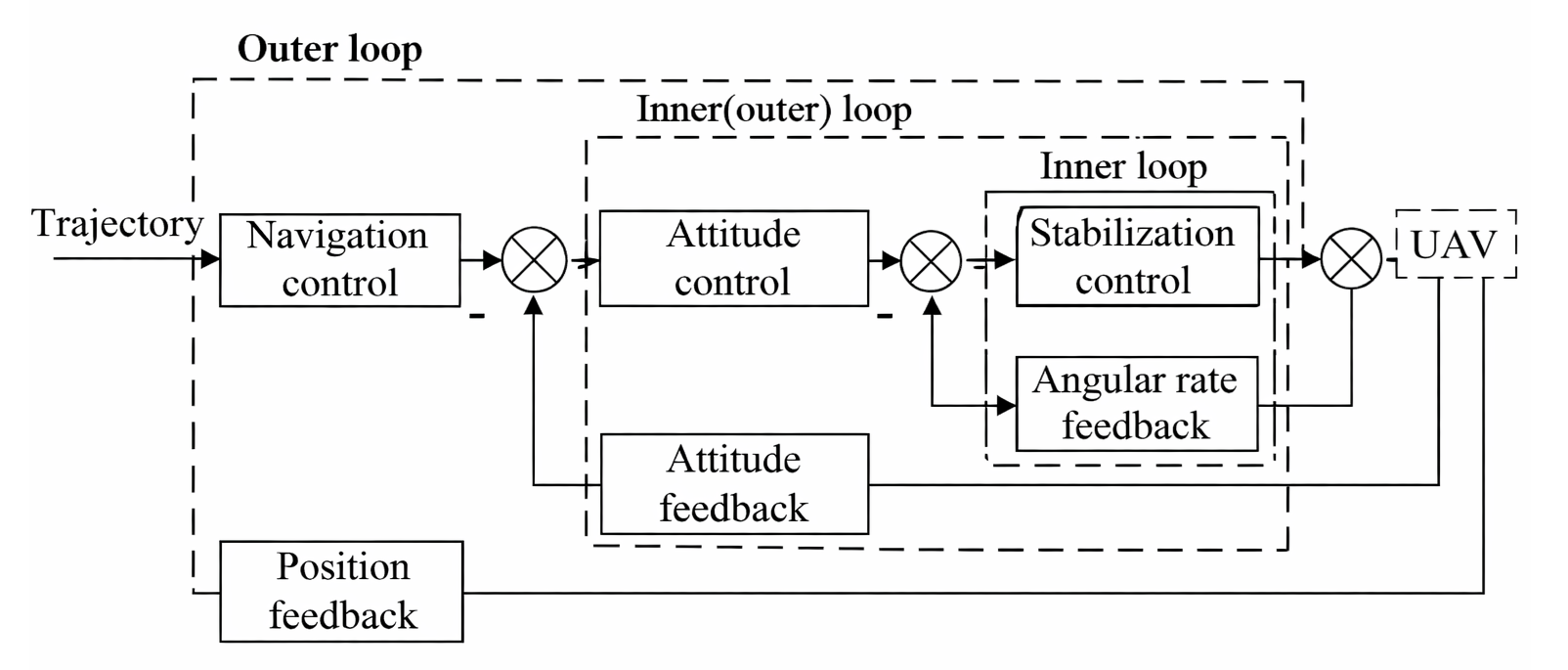
Slika 3. Princip rada upravljačkog sustava
Princip rada kontrolnog sustava počinje davanjem željene ulazne vrijednosti sustavu.Sustav zatim uspoređuje ovu vrijednost sa stvarnom izlaznom vrijednošću.Razlika između njih naziva se signal greške.Ako greška postoji, sustav generira signal korekcije.Ova korekcija prilagođava proces kako bi se smanjila pogreška.Izlaz se mijenja i kontinuirano se ponovno provjerava.Ciklus se ponavlja sve dok izlaz ne odgovara željenoj vrijednosti.
Karakteristike sustava upravljanja
Sustavi upravljanja ocjenjuju se na temelju toga koliko dobro rade tijekom rada.Ove karakteristike opisuju kvalitetu i pouzdanost odziva sustava.
|
Karakteristike |
Opis |
|
Stabilnost |
Izlaz ne
ne razilaze se;vraća se na stabilnu vrijednost nakon poremećaja |
|
Točnost |
Konačna pogreška ≤
±2–5% postavljene vrijednosti |
|
Preciznost |
Izlaz
varijacija ≤ ±1% pod istim ulazom |
|
Vrijeme odziva
|
Početna
reakcija se javlja unutar izmjerenog vremena odgode (td) |
|
Vrijeme porasta |
Vrijeme od 10%
do 90% konačne vrijednosti |
|
Vrijeme poravnanja |
Ulazi i
ostaje unutar opsega od ±2%. |
|
Prekoračenje |
Vrhunac prelazi
konačna vrijednost po % iznosa |
|
Stabilno stanje
Greška |
Konstanta
pomak preostali nakon stabilizacije |
|
Osjetljivost |
ΔIzlaz /
ΔOmjer promjene parametra |
|
Robusnost |
Održava
rad unatoč promjeni smetnji |
|
Širina pojasa |
Djeluje
učinkovito do -3 dB granične frekvencije |
|
Ponovljivost |
Isti unos
proizvodi isti rezultat unutar tolerancije |
|
Pouzdanost |
Djeluje
bez greške za nazivno vrijeme rada (MTBF) |
|
Prigušivanje |
Oscilacija
raspad određen omjerom prigušenja ζ |
|
Brzina od
Odgovor |
Ukupno vrijeme do
dostići stabilno stanje |
Vrste upravljačkih sustava
Kontrolni sustavi klasificirani su na temelju načina na koji rukuju informacijama, signalima i ponašanjem odgovora.Grupirani su prema korištenju povratne informacije, obliku signala i matematičkom ponašanju.
Kontrolni sustav otvorene petlje

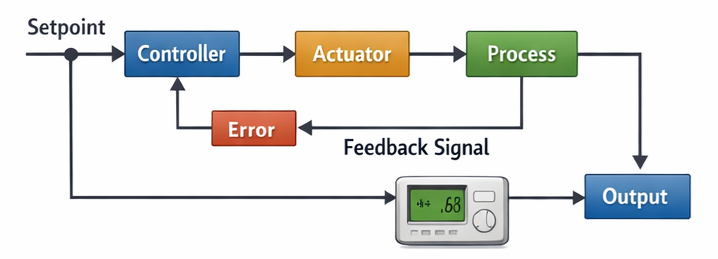
Slika 4. Dijagram upravljačkog sustava otvorene petlje
Sustav upravljanja s otvorenom petljom je sustav u kojem izlaz ne utječe na djelovanje upravljanja.Sustav šalje naredbu i pretpostavlja da je rezultat točan bez provjere.Budući da ne postoji povratni put, ne može automatski ispraviti pogreške ili smetnje.Učinkovitost uglavnom ovisi o ispravnoj kalibraciji i radnim uvjetima.Ovi sustavi su jednostavni, jeftini i lako se dizajniraju.Međutim, promjene opterećenja ili okoline mogu utjecati na konačni rezultat.Uobičajeni primjeri uključuju mjerač vremena za električni toster, kontrolu vremena za perilicu rublja i fiksni mjerač vremena za navodnjavanje.
Kontrolni sustav zatvorene petlje
Slika 5. Dijagram upravljačkog sustava zatvorene petlje
Kontrolni sustav zatvorene petlje je sustav koji koristi povratnu spregu za automatsko podešavanje izlaza.Sustav mjeri rezultat i uspoređuje ga sa željenom vrijednošću.Ako se pojavi razlika, primjenjuje se korekcija kako bi se smanjila pogreška.Ova kontinuirana prilagodba omogućuje točan i stabilan rad čak i kada se uvjeti mijenjaju.Sustavi zatvorene petlje pružaju bolju preciznost i pouzdanost od sustava otvorene petlje.Naširoko se koriste u modernim aplikacijama za automatsko upravljanje.Tipični primjeri uključuju kontrolu temperature klima uređaja, tempomat vozila i automatske regulatore napona.
Sustav kontrole kontinuiranog vremena
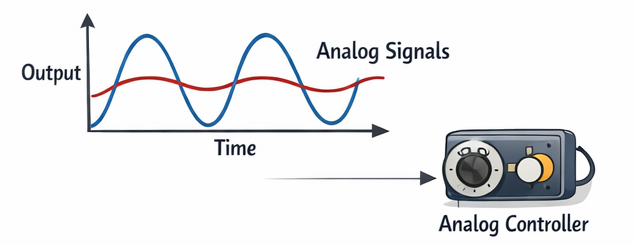
Slika 6. Kontinuirani (analogni) kontrolni signal
Kontrolni sustav kontinuiranog vremena obrađuje signale koji se glatko mijenjaju tijekom vremena.Ulaz i izlaz postoje u svakom trenutku bez prekida.Ovi sustavi obično rade s analognim električnim ili mehaničkim signalima.Budući da su signali kontinuirani, odgovor je također gladak i prirodan.Sustavi s kontinuiranim vremenom obično se nalaze u tradicionalnim analognim regulatorima.Prikladni su za fizičke procese koji zahtijevaju trenutnu reakciju.Primjeri uključuju analogne regulatore brzine, kontrolu glasnoće audio pojačala i kontrolu položaja hidrauličkog ventila.
Sustav upravljanja s diskretnim vremenom
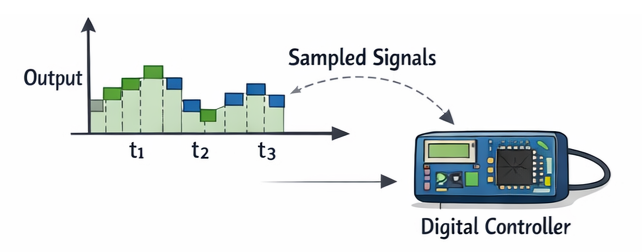
Slika 7. Diskretni (digitalni) upravljački signal
Sustav kontrole u diskretnom vremenu radi pomoću uzorkovanih podatkovnih signala.Sustav provjerava i ažurira vrijednosti samo u određenim vremenskim intervalima.Ove signale obično obrađuju digitalni upravljači ili mikroprocesori.Izlaz se mijenja korak po korak, a ne kontinuirano.Takvi sustavi omogućuju programabilni rad i fleksibilnu prilagodbu.Imaju široku primjenu u suvremenom elektroničkom i računalno baziranom upravljanju.Primjeri uključuju kontrolu temperature temeljenu na mikrokontrolerima, digitalnu kontrolu brzine motora i pametne kućne termostate.
Linearni sustav upravljanja
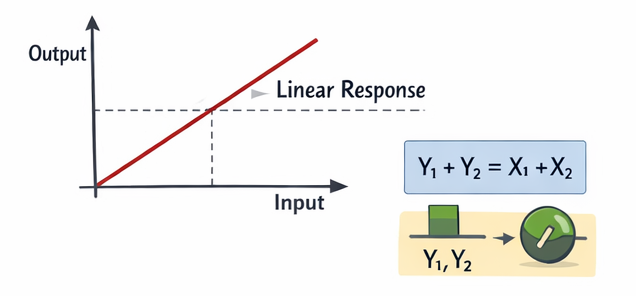
Slika 8. Odnos ulaza i izlaza linearnog sustava
Linearni sustav upravljanja slijedi proporcionalni odnos između ulaza i izlaza.Ako se ulaz udvostruči, izlaz se također udvostručuje pod istim uvjetima.Ovi sustavi zadovoljavaju načelo superpozicije gdje kombinirani ulazi proizvode kombinirane izlaze.Linearno ponašanje omogućuje predvidljivu i jednostavnu matematičku analizu.Većina teoretskih upravljačkih dizajna pretpostavlja linearni rad radi jednostavnosti.Linearni modeli pomažu u projektiranju stabilnih i točnih sustava.Primjeri uključuju elektronička pojačala malog signala i područja upravljanja motorom niskog opterećenja.
Nelinearni sustav upravljanja
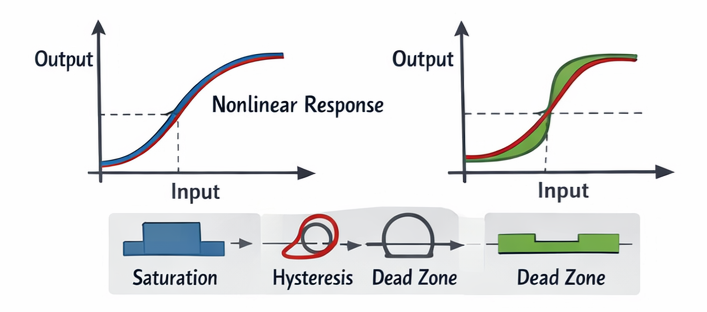
Slika 9. Karakteristike odziva nelinearnog sustava
Nelinearni sustav upravljanja ima izlaz koji nije proporcionalan ulazu.Odziv se mijenja ovisno o radnom rasponu ili uvjetima.Male ulazne promjene mogu proizvesti velike izlazne varijacije ili uopće izostati.Često se pojavljuju efekti poput zasićenja, histereze i mrtvih zona.Te je sustave teže analizirati, ali točnije predstavljaju fizičke procese.Mnogi se sustavi prirodno ponašaju na nelinearan način.Primjeri uključuju ograničenja kretanja robotske ruke, ponašanje magnetskog pokretača i kontrolu protoka ventila u ekstremnim položajima.
Prednosti i nedostaci sustava upravljanja
Kontrolni sustavi poboljšavaju dosljednost i smanjuju ručni napor, ali također uvode složenost i troškove.
Prednosti sustava upravljanja
• Sustav tijekom rada održava izlaz blizu tražene vrijednosti.
• Operateri ne moraju stalno ručno podešavati opremu.
• Strojevi mogu raditi duge sate bez čestog zaustavljanja.
• Sustav automatski ispravlja promjene uvjeta.
• Status rada može se provjeriti s ploče ili udaljenog zaslona.
Nedostaci kontrolnih sustava
• Cijena postavljanja veća je od jednostavnih ručnih sustava.
• Potrebni su kvalificirani radnici za postavljanje i servis.
• Senzori i elektronički dijelovi mogu s vremenom otkazati.
• Pronalaženje uzroka problema može potrajati dulje.
• Sustav ovisi o stabilnoj električnoj energiji.
Primjene upravljačkih sustava
Upravljački sustavi koriste se iu industrijskoj automatizaciji iu svakodnevnoj opremi za automatsko održavanje ispravnog rada.
1. Industrijska proizvodnja
Proizvodni strojevi održavaju dosljedne dimenzije i kvalitetu proizvoda.Automatizirane linije za sklapanje koriste regulaciju kako bi se osigurala ponovljivost.Time se smanjuje otpad i poboljšava učinkovitost.
2. Regulacija temperature
Oprema za grijanje i hlađenje održava ugodne uvjete okoline.Zgrade se oslanjaju na automatsku prilagodbu za stabilizaciju unutarnje klime.To poboljšava energetsku učinkovitost i udobnost.
3. Transportni sustavi
Vozila koriste kontrolu brzine i stabilnosti za glatkiji rad.Moderni automobili uključuju tempomat i sustave vuče.Oni poboljšavaju sigurnost vožnje i performanse.
4. Energetski sustavi
Električne mreže reguliraju razine napona i frekvencije.Generatori prilagođavaju izlaz kako bi odgovarali zahtjevima opterećenja.To osigurava stabilnu opskrbu električnom energijom.
5. Robotika i automatizacija
Roboti izvode točne zadatke pozicioniranja i kretanja.Automatizirani strojevi rade kontinuirano s visokom preciznošću.To omogućuje naprednu proizvodnju.
6. Medicinska oprema
Uređaji održavaju kontrolirane radne uvjete tijekom tretmana.Oprema za nadzor održava vrijednosti unutar sigurnih granica.To poboljšava sigurnost i pouzdanost pacijenata.
7. Kućanski aparati
Svakodnevni uređaji automatski upravljaju postavkama rada.Perilice i hladnjaci održavaju ispravne radne uvjete.Ovo pojednostavljuje svakodnevne zadatke.
8. Zrakoplovni sustavi
Zrakoplovi i dronovi održavaju stabilne uvjete leta.Automatsko navođenje održava točnu orijentaciju i visinu.Ovo podržava pouzdanu navigaciju.
Kontrolni sustav vs automatizacija vs ugrađeni sustavi
Te su tehnologije usko povezane, ali služe različitim inženjerskim svrhama unutar modernih elektroničkih i industrijskih proizvoda.
|
Značajka |
Kontrola
sustav |
Automatizacija |
Ugrađeno
sustav |
|
Glavni fokus |
Regulacija od
varijable |
Proces
izvršenje |
Uređaj
operacija |
|
Svrha |
Održavati
željenu vrijednost |
Obavljati zadatke
automatski |
Trčite predano
funkcije |
|
Opseg |
Specifično
procesno ponašanje |
Cijeli
tijek rada
|
samac
uređaj proizvoda |
|
Odluka
Sposobnost |
Na temelju
izmjerene vrijednosti |
Na temelju
programirana logika |
Na temelju
firmware |
|
Upotreba povratnih informacija |
često
potrebno |
Neobavezno |
Neobavezno |
|
Vrsta hardvera |
Senzori i
aktuatori |
Strojevi i
kontrolori |
Mikrokontroler
ploča |
|
Uloga softvera |
Kalkulacija
i ispravak |
Sekvenciranje
i koordinacija |
Uređaj
upravljačka logika |
|
Vrsta odgovora |
Kontinuirano
prilagođavanje |
zadatak
izvršenje |
Funkcionalan rad |
|
Veličina sustava |
Mali do
srednji |
Srednje do
velika |
Vrlo mala |
|
Fleksibilnost |
Umjereno |
visoko |
ograničeno |
|
Vrijeme
Zahtjev |
visoko |
Umjereno |
visoko |
|
Primjena
Razina |
Razina procesa |
Razina postrojenja |
Razina proizvoda |
|
Primjer |
Temperatura
kontrola |
Tvornica
proizvodna linija |
Pametni sat |
|
Integracija |
Dio od
automatizacija |
Sadrži
sustavi upravljanja |
Podržava oboje |
Zaključak
Kontrolni sustavi održavaju stabilnost kontinuiranim uspoređivanjem stvarne izlazne snage s ciljnom vrijednošću i ispravljanjem svake pogreške.Njihova izvedba ovisi o ključnim elementima kao što su povratna informacija, djelovanje kontrolera i kontrolirani proces.Različite klasifikacije definiraju kako se rukuje signalima i koliko točno sustav reagira na smetnje.Zbog ovih mogućnosti, sustavi upravljanja imaju široku primjenu u industriji, transportu, energetici, medicinskim uređajima i svakodnevnoj opremi.
O nama
ALLELCO LIMITED
Čitaj više
Brz upit
Molimo pošaljite upit, odmah ćemo odgovoriti.
Često postavljana pitanja [FAQ]
1. Koja je razlika između kontrolera i upravljačkog sustava?
Regulator je samo uređaj za donošenje odluka (kao PLC ili PID regulator).Upravljački sustav uključuje regulator plus senzore, aktuatore i proces koji se regulira.
2. Što je PID regulacija i zašto je važna?
PID regulacija koristi proporcionalne, integralne i izvedene radnje za brzo i glatko smanjenje pogreške.Poboljšava stabilnost, točnost i brzinu odziva u većini industrijskih sustava.
3. Zašto kontrolni sustavi ponekad osciliraju ili traže?
Oscilacije se javljaju kada su korekcije preagresivne ili odgođene.Loše ugađanje, spori senzori ili pretjerano pojačanje uzrokuju opetovano prekoračenje izlaza.
4. Što je zasićenje aktuatora?
Zasićenje aktuatora događa se kada aktuator dosegne svoju fizičku granicu i ne može dalje povećavati izlaz.Ovo sprječava sustav da ispravi velike pogreške.
5. Kako sustavi upravljanja rješavaju kašnjenja u procesima?
Oni koriste metode ugađanja, filtre ili prediktivne algoritme za kompenzaciju kašnjenja tako da se ispravak dogodi u pravo vrijeme.

Vodič za otpornike od 4,7 kΩ: Šifra boja, upotreba, testiranje i usporedba vrijednosti
na 2026/02/16

Minijaturni prekidač (MCB): princip rada, tipovi, ocjene i vodič za odabir
na 2026/02/15
Popularni postovi
-

Složeni računali s uputama: Kako su promijenili računanje?
na 8000/04/18 147774
-

USB-C pinout i značajke
na 2000/04/18 112013
-
Korištenje Xilinx Unified simulacijski primitivi: sveobuhvatni vodič za dizajn i simulaciju FPGA
na 1600/04/18 111351
-
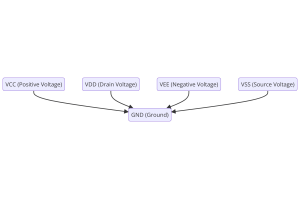
Naponi napajanja u elektronici: Značenje VCC, VDD, VEE, VSS i GND
na 0400/04/18 83769
-

RJ45 Vodič za priključak: pinout, ožičenje, vrste kabela i upotreba
na 1970/01/1 79565
-

Krajnji vodič za kodove u boji žice u modernim električnim sustavima
Način na koji naši električni sustavi koriste boje nisu samo za izgled.Svaka boja žice sada označava određenu funkciju, što olakšava prepoznavanje i ispravno obradu električnih komponenti tijekom u...na 1970/01/1 66960
-

Vodič za čišćenje ventila: Funkcija, simptomi, testiranje i zamjena za optimalne performanse motora
Ventil za čišćenje ključni je dio sustava automobila koji pomaže u održavanju zraka čistim upravljanjem parima goriva prije nego što mogu pobjeći u atmosferu.To ne samo da pomaže okolišu smanjenjem...na 1970/01/1 63100
-
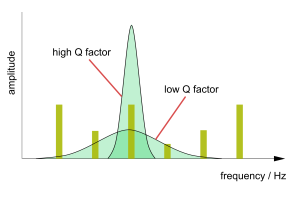
Kvaliteta (q) Faktor: jednadžbe i aplikacije
Faktor kvalitete, ili 'q', važan je prilikom provjere koliko dobro induktori i rezonatori rade u elektroničkim sustavima koji koriste radio frekvencije (RF).'Q' mjeri koliko dobro krug minimizira g...na 1970/01/1 63041
-
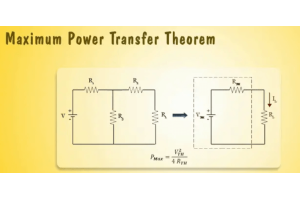
Postizanje vršnih performansi s maksimalnim teoremom prijenosa snage
Teorem maksimalnog prijenosa napajanja objašnjava kako energija iz izvora, poput baterije ili generatora, teče do povezanog opterećenja.Pokazuje točan uvjet u kojem opterećenje prima najviše snage....na 1970/01/1 54097
-

Specifikacije i kompatibilnost A23
A23 baterija je mala baterija u obliku cilindra s visokim naponom.Također se naziva 23A, 23AE ili MN21, radi na 12 volti i mnogo više od AA ili AAA baterija.Njegov poseban dizajn čini ga s...na 1970/01/1 52184
Vrući broj dijela
-

KSH45H11ITU
onsemi
TRANS PNP 80V 8A IPAK
M24C04-RDW6TP
STMicroelectronics
IC EEPROM 4KBIT I2C 8TSSOP
MAN493C
onsemi
DISPLAY 7SEG 0.39" SGL RED 10DIP
2SD1796
Sanken Electric USA Inc.
TRANS NPN DARL 60V 4A TO220F
12101U102JAT2A
KYOCERA AVX
CAP CER 1000PF 100V NP0 1210
LTC2321IUFD-16#PBF
Analog Devices Inc.
IC ADC 16BIT SAR 28QFN
HF70ACB322513-T
TDK Corporation
FERRITE BEAD 52 OHM 1210 1LN
A4983SETTR-T
Allegro MicroSystems
IC MTR DRV BIPOLAR 3V-5.5V 28QFN
FQPF5N30
onsemi
MOSFET N-CH 300V 3.9A TO220F
CY14B101KA-ZS25XI
Infineon Technologies
IC NVSRAM 1MBIT PAR 44TSOP II
1SMB13AT3G
Littelfuse Inc.
TVS DIODE 13VWM 21.5VC SMB
MAX2820EGM
Analog Devices Inc./Maxim Integrated
2.4GHZ 802.11B ZERO-IF TRANSCEIV
EP1C3T144C8
Intel
IC FPGA 104 I/O 144TQFP
LTC1555IGN#TRPBF
Analog Devices Inc.
IC TRNSLTR BIDIRECTIONAL 16SSOP
VSC7227YKV-01
Microchip Technology
IC TELECOM INTERFACE 12CHAN
FDC6323L
onsemi
IC PWR SWITCH P-CH 1:1 SUPERSOT6
MX25R8035FZUIH1
Macronix
IC FLASH 8MBIT SPI/QUAD 8USON
DM7417N
Texas Instruments
IC BUFFER NON-INVERT 5.25V 14DIP -

CDCEL949PWR
Texas Instruments
IC CLK/FREQ SYNTH 24TSSOP
ALQ105
Panasonic Electric Works
RELAY GEN PURPOSE SPDT 10A 5V
CRCW12061K30FKEAHP
Vishay Dale
RES SMD 1.3K OHM 1% 3/4W 1206
12065C823MAT2A
KYOCERA AVX
CAP CER 0.082UF 50V X7R 1206
DA101MC-R
Murata Power Solutions Inc.
DIGITAL AUDIO TX
LTM8020EV#PBF
Analog Devices Inc.
DC DC CONVERTER 1.25-5V
FH19SC-10S-0.5SH(82)
Hirose Electric Co Ltd
CONNECTOR
CD4024BPW
Texas Instruments
IC BINARY COUNTER 7-BIT 14TSSOP
TPS2231RGPT
Texas Instruments
IC PWR SWITCH 1:1 20QFN
EMK1HM101FB0D00R
Aishi Capacitors (Hunan Aihua Group
ALUMINUM E-CAP SMT
08051A301JAT2A
KYOCERA AVX
CAP CER 300PF 100V NP0 0805
MCP1703AT-2502E/MB
Microchip Technology
IC REG LINEAR 2.5V 250MA SOT89-3
MAX11626EEE+T
Analog Devices Inc./Maxim Integrated
IC ADC 12BIT SAR 16QSOP
EPF8452AQC160-3
Intel
IC FPGA 120 I/O 160QFP
SMA6J24A-TR
STMicroelectronics
TVS DIODE 24VWM 44.3VC SMA
045803.5DR
Littelfuse Inc.
FUSE BOARD MNT 3.5A 48VAC 75VDC
CFUKG455KG1A-R0
Murata Electronics
FILTER
XC3S1500-4FG676I
AMD
IC FPGA 487 I/O 676FCBGA -

TPS75918KTTRG3
Texas Instruments
IC REG LINEAR 1.8V 7.5A DDPAK
BZT52B33
Yangjie Technology
SOD-123 33V 0.5W Diodes Zener
T8132NLT
Pulse Electronics
CMC 16LN SMD
AT27LV520-90XU
Microchip Technology
IC EPROM 512KBIT PAR 20TSSOP
MAL214655222E3
Vishay Beyschlag/Draloric/BC Components
CAP ALUM 2200UF 20% 16V RADIAL
DMPH6250SQ-7
Diodes Incorporated
MOSFET P-CH 60V 2.4A SOT23 T&R
EL5362IS
Renesas Electronics America Inc
IC OPAMP CFA 3 CIRCUIT 16SOIC
SMBG13A-E3/52
Vishay General Semiconductor - Diodes Division
TVS DIODE 13VWM 21.5VC DO215AA
MAX1241CESA
Analog Devices Inc./Maxim Integrated
IC ADC 12BIT SAR 8SOIC
SMBJ45A
Meritek
TVS DIODE 45VWM 72.7VC
GRM0335C1E9R8DA01D
Murata Electronics
CAP CER 9.8PF 25V C0G/NP0 0201
MPQ6400DG-33-AEC1-LF-Z
Monolithic Power Systems Inc.
IC SUPERVISOR 1 CHANNEL 6QFN
S-80844CLMC-B65T2G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SOT23-5
GRM216R71H182KA01D
Murata Electronics
CAP CER 1800PF 50V X7R 0805
SN74ALS11ANS
Texas Instruments
IC GATE AND 3CH 3-INP 14SO
2220GA222JAT1A
KYOCERA AVX
CAP CER 2200PF 2KV NP0 2220
HFA1100IP
Harris Corporation
IC OPAMP CFA 1 CIRCUIT 8DIP
AT90PWM81-16SN
Microchip Technology
IC MCU 8BIT 8KB FLASH 20SOIC